I – Antecedentes.
Conforme al Principio de Relatividad de Galileo, las leyes de la Física son idénticas en cualquier sistema de referencia inercial. La Mecánica Clásica, e incluso la mayoría de las teorías físicas modernas, se han formulado para marcos de referencia inerciales, comprobándose su cumplimiento en estos sistemas.
No obstante, fuera de estos límites se encuentran otros supuestos de la naturaleza, para los que todavía hoy desconocemos sus leyes de comportamiento. Un ejemplo es el análisis de los cuerpos sólidos rígidos dotados de movimiento de rotación, pues en ellos es necesario tener en cuenta las reacciones inerciales que pudieran suscitarse. Desde una óptica relativista, una rotación intrínseca, puede interpretarse como un móvil fijo, y un giro del espacio de sucesos que lo contiene. En este supuesto pueden plantearse distintos experimentos, y constatar las observaciones resultantes. A título de ejemplo podríamos proponer:
1. Múltiples rotaciones. Un móvil sometido a pares no coaxiales sucesivos puede reaccionar mediante dos giros no coaxiales simultáneos. En este supuesto, el sistema de coordenadas definido por un vector de posición y los ángulos de Euler para determinar su orientación, no identifica la evolución de la posición de cada punto del móvil de forma biunívoca y coherente con el movimiento del cuerpo. Resulta pues necesario un nuevo sistema de referencia idóneo para estos supuestos.
2. Par giroscópico. En el supuesto de un cuerpo dotado de rotación intrínseca, la acción de un nuevo momento no coaxial, genera una reacción inercial que se identifica como un par giroscópico, que no responde a las leyes de Newton, y que se encuentra claramente desestructurado en la mecánica clásica. Resulta pues necesario incorporar este fenómeno, y en general a las reacciones inerciales, en una estructura lógica y científica, en el ámbito de la mecánica.
Estas referencias experimentales, y otras muchas que pudieran plantearse, infieren la existencia de otra dinámica rotacional, no newtoniana, necesaria para la identificación del comportamiento de cuerpos en rotación, cuando son sometidos a nuevos estímulos no coaxiales, y a los que su comportamiento, en la actualidad en muchos casos, se entiende anómalo, paradójico o caótico, ya que las leyes de que disponemos no permiten identificarlo y predeterminarlo.
II- Deducción.
Esta nueva dinámica rotacional no inercial y no newtoniana puede ser inferida mediante, al menos, dos vías diferenciadas:
- Deducción relativista
- Deducción no relativista
Deducción relativista. Por vía abstracta, matemáticamente puede inferirse un sistema de ecuaciones que permitan concebir las interacciones fundamentales que llegan a generarse en la naturaleza. En estas ecuaciones puede observarse como la matriz de una rotación tetra-dimensional de un marco de referencia, está asociada con el campo de inercia Tijk originado por la rotación, y pueden deducirse nuevas ecuaciones del movimiento, expresión generalizada de las ecuaciones de movimiento en la teoría gravitatoria de Einstein.
Deducción no relativista. En los supuestos de rotaciones no coaxiales simultáneas se producen en el cuerpo rígido campos de velocidades no homogéneos. Estos campos con distribuciones no homogéneas, generan campos de aceleraciones anisótropos. Estos campos pueden interpretarse como campos de fuerzas inerciales, creados en el espacio por efecto de rotaciones no coaxiales simultáneas.
En base a lo expresado, podemos interpretar que no existe físicamente ese par giroscópico, ya que es, simplemente, el efecto observable de un campo de fuerzas inerciales generado por la rotación, no coaxial, simultánea del espacio. Este fenómeno puede quedar estructurado en una nueva dinámica rotacional no inercial, en el ámbito de la Teoría de Interacciones Dinámicas.
No obstante, el referido par giroscópico ha sido cuantificado, mediante múltiples procedimientos de la mecánica clásica, con la siguiente formulación:
D = I Ω ω (1)
En base al Principio de Conservación de la Cantidad de Movimiento, este par será equivalente al exterior actuante. Por tanto, podemos inferir que el campo de fuerzas inerciales generado en el espacio en rotación, por un nuevo par no coaxial M´, sobre un móvil con movimiento de rotación ![]() y con momento de inercia I sobre ese eje de rotación y, por tanto, con un momento angular
y con momento de inercia I sobre ese eje de rotación y, por tanto, con un momento angular ![]() , obligara al móvil a adquirir una velocidad de precisión
, obligara al móvil a adquirir una velocidad de precisión ![]() , definida por el cociente escalar:
, definida por el cociente escalar:
Ω = M´/ (I ω) = M´/ L (2)
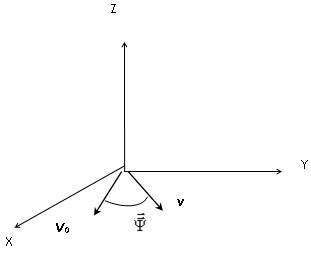
Figura 1. El operador rotacional ![]() transforma, por medio de una rotación, al vector velocidad inicial
transforma, por medio de una rotación, al vector velocidad inicial ![]() , en el vector v, ambos situados siempre en un mismo plano, en este ejemplo en el plano XY.
, en el vector v, ambos situados siempre en un mismo plano, en este ejemplo en el plano XY.
Esta velocidad de precesión ![]() podrá observarse de forma simultánea a la inicial
podrá observarse de forma simultánea a la inicial ![]() , que se mantendrá constante en el cuerpo. En una primera aproximación la consideraremos como instantánea con la acción del momento M´. Además, y como hipótesis discriminante, en caso de movimiento de traslación del cuerpo, planteamos la hipótesis dinámica de que el campo de velocidades de traslación se acoplará con el campo anisótropo de velocidades inerciales creadas por el segundo par no coaxial, siendo el movimiento resultante una orbitación simultanea con la rotación intrínseca del móvil. Este nuevo movimiento de orbitación generado por un momento no coaxial, vendrá definido por la rotación del vector velocidad, manteniéndose éste constante en modulo.
, que se mantendrá constante en el cuerpo. En una primera aproximación la consideraremos como instantánea con la acción del momento M´. Además, y como hipótesis discriminante, en caso de movimiento de traslación del cuerpo, planteamos la hipótesis dinámica de que el campo de velocidades de traslación se acoplará con el campo anisótropo de velocidades inerciales creadas por el segundo par no coaxial, siendo el movimiento resultante una orbitación simultanea con la rotación intrínseca del móvil. Este nuevo movimiento de orbitación generado por un momento no coaxial, vendrá definido por la rotación del vector velocidad, manteniéndose éste constante en modulo.
En el supuesto de la figura 1, el nuevo par externo M´, que se suponemos situado en el eje X, generará una rotación inercial alrededor del eje Z, por lo que sí el vector de traslación ![]() se encontraba situado en el plano XY, también seguirá en ese plano la velocidad resultante después de la rotación. Por tanto, la matriz espacial de rotación
se encontraba situado en el plano XY, también seguirá en ese plano la velocidad resultante después de la rotación. Por tanto, la matriz espacial de rotación ![]() , será de la forma:
, será de la forma:
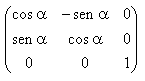
y generará, en nuestro supuesto, un giro del referido vector de traslación ![]() en ese plano XY. Resulta así como ecuación del movimiento:
en ese plano XY. Resulta así como ecuación del movimiento:
![]() (3)
(3)
No obstante, siendo:
α = Ω t (4)
conforme a la ecuación (2):
α = M´ t/ (I ω) (5)
la ecuación del movimiento resulta:
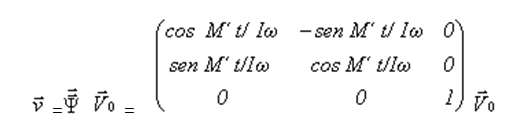 (6)
(6)
De esta forma podemos asociar efectos dinámicos a la velocidad, y una clara correlación matemática entre rotación y traslación. Esta conexión matemática nos permite identificar una relación física entre transferencias de energía cinética de rotación a energías cinéticas de traslación, y viceversa.
Numerosos ejemplos pueden plantearse para comprobar estas hipótesis dinámicas, que nos permitirían interpretar muchos supuestos de la naturaleza, no comprendidos hasta la fecha.
Esta nueva dinámica rotacional no inercial sustentada en la Teoría de Interacciones Dinámicas, se desarrolla en leyes y corolarios, permitiendo múltiples aplicaciones científicas y tecnológicas inéditas.
III – Generalización de la mecánica.
Como expresábamos inicialmente, la Mecánica Clásica se ha formulado para marcos de referencia inercial, y no para espacios de sucesos en rotación. No obstante, es posible concebir una nueva mecánica para cualquier tipo de espacio, incorporando sus reacciones inerciales y definiendo una Dinámica de Campos Inerciales. De esta forma quedarían también estructurados racionalmente los fenómenos inerciales, e incorporados a una mecánica unificada.
Para incorporar los fenómenos inerciales a la estructura del conocimiento físico es necesario analizar el movimiento en coordenadas no holónomas y las reacciones axiales que se producen, en el entendimiento de que una mecánica, como la mecánica clásica, basada en coordenadas holónomas y reacciones polares representará solo una visión limitada y parcial de la naturaleza.
La generalización que se propone no expresa que la mecánica clásica esté obsoleta o equivocada, simplemente que es parcial y limitada, ya que se refiere al supuesto concreto de sistemas inerciales. Deseamos, y podemos ser más ambiciosos, buscando leyes dinámicas más generales, en las que se regule el comportamiento de los móviles ante rotaciones, o incluso sometidos a múltiples rotaciones no coaxiales del espacio de sucesos.
La Teoría de Interacciones Dinámicas generaliza el concepto de par giroscópico, y el de otros fenómenos inerciales, incorporándolos a la estructura unificada de una nueva dinámica rotacional no inercial.
Conforme a la Teoría de Interacciones Dinámicas que se sustenta, podemos concebir un universo en constante equilibrio dinámico, en el que, un par de fuerzas, de resultante nula, generará, mientras actúe, un movimiento de orbitación constante, en trayectoria cerrada. Es evidente la trascendencia de este modelo matemático, en el que los protagonistas ya no son sólo las fuerzas, sino también los momentos de fuerzas que, mientras se mantengan constantes, generarán movimientos orbitales, y constantemente recurrentes, generando un sistema en equilibrio dinámico, y no en expansión ilimitada. Esta Teoría de Interacciones Dinámicas se argumenta y describe en el libro de Gabriel Barceló: Un Mundo en Rotación (2008), y sus antecedentes y fundamentos se enuncian en el libro del mismo autor: El Vuelo del Bumerán (2005).
IV – Mecánica celeste.
Las deducciones resultantes de esta dinámica rotacional pueden ser de relevancia para solucionar problemas de la dinámica del cosmos. En el universo los movimientos habituales y reiterados de los cuerpos celestes son acelerados por rotaciones, salvo los de caída libre. No obstante, la teoría general de la relatividad de Einstein, la relatividad especial, la relatividad de Galileo-Newton y, en general la Mecánica Clásica, se sustentan en el supuesto de relatividad traslacional. Estas teorías consideran transformaciones en coordinadas holónomas traslacionales, por lo que, cuando describen movimientos de rotación, deben añadirse a las trasformaciones de coordenadas traslacionales, la trasformación de coordenadas angulares. La Teoría de Interacciones Dinámicas permite identificar de forma más real y sencilla el comportamiento de los cuerpos celestes en constante orbitación y rotación.
En el modelo cosmológico estándar existe todavía un amplio campo de trabajo en mecánica relativista aplicando una Teoría de la relatividad rotacional, que permitiría poder comprender mejor el comportamiento de Universo.
En la observación de sistemas dinámicos en los que se adviertan movimientos simultáneos de rotación intrínseca y orbitación, puede inferirse la posible existencia de interacciones dinámicas.
Además de permitirnos comprender mejor el equilibrio del universo, la Teoría de Interacciones Dinámicas nos permite concebir la verdadera dinámica de las galaxias, y el porqué del plano de la eclíptica o de los anillos de Saturno. De esta forma, deducimos que los anillos que se generan en los sistemas planetarios pueden responder al efecto de un par externo constante, en el ámbito de esta teoría.
La teoría nos permite también dar respuesta a una aporía: constatar y comprender la correlación física y matemática entre orbitación y rotación intrínseca, y por tanto, la causalidad racional de que tengamos días y noches en la Tierra, ya que en esta teoría existe una clara correlación entre giro intrínseco de la Tierra y el recorrido en su órbita.
La teoría define un modelo de universo en el que las fuerzas no crean siempre aceleraciones proporcionales a la masa, que supondría para una fuerza constante, velocidades crecientes hasta el infinito. En vez de ello, los momentos de las fuerzas generan un equilibrio dinámico, al transferir velocidades lineales, a velocidades orbitales, y transformar las trayectorias rectilíneas, en trayectorias curvilíneas y orbitales, asociando efectos dinámicos a la velocidad, cuando en el ámbito de la Mecánica Clásica, y conforme a la segunda ley de Newton, las causas dinámicas están asociadas a los cambios de velocidad.
Editorial Arpegio SL ha publicado un tratado de Gabriel Barceló, en dos tomos sobre la evolución del conocimiento de nuestro entorno: Imago Universi: Una concepción humana del cosmos. Es un tratado cosmológico en el que el último capitulo incorpora sugerencias sobre la aplicación de la Teoría de Interacciones Dinámicas (TID) a los fenómenos dinámicos del universo. Ha sido realizado un video de presentación del libro (Ver vídeo) y una página web dedicada a este libro (Ver web).
En el último capítulo del libro Imago Universi, se expone esta teoría como una nueva estructura conceptual para explorar la dinámica en marcos no inerciales y, en concreto, la dinámica celeste de cuerpos rígidos sometidos a múltiples rotaciones no coaxiales. Posteriormente, y como resumen del tratado “Imago Universi”, la revista: International Journal of Astronomy and Astrophysics, ha publicado el artículo: “Proposal of new criteria for celestial mechanics” del mismo autor (Ver Artículo), en el que puede analizarse una aproximación de la aplicación de la Teoría de Interacciones Dinámicas para mejor comprender nuestro entorno cosmológico y la mecánica celeste.